2007-10-08
Endeavour
STS-123 kommer ha med sig två viktiga moduler/element till ISS. Den
första är den japanska forskningsmodulen Kibo och den andra är den sista
delen till stationens robotarm. Båda dessa delar är viktiga för ISS och
i visa fall nödvändiga för på ett effektivt sätt underhålla och utnyttja
rymdstationen.
Dextre (Special Purpose Dexterous Manipulator)

Artistbild över
Dextre.
Bild: NASA.
|
Dextre är byggd i Kanada, precis som resten av robotarmen, och kommer
fungera som en förlängning av den befintliga robotarmen, Candarm2,
ombord. Det som skiljer Dextre från tidigare robotarmar är att den har
två likadana armar, vilket gör att den kan arbeta som en människa och
greppa saker på samma sätt som en människa greppar saker med sina
händer. Detta gör att Dextre kommer bli en stor tillgång när det gäller
reparationer och förflyttningar på utsidan av ISS. Men det är inte bara
att flytta saker som Dextre är bra på utan hon kan även skruva ur och in
bultar, vilket gör att Dextre kommer kunna montera till exempel nya
batterier på utsidan av ISS. I dagsläget kräver operationer av denna typ
en riskfylld rymdpromenad.
Tack vare sin utformning med två armar med vardera sex
leder har Dextre en stor rörelsefrihet och kan uppnå millimeterprecision
i sina rörelser. Varje arm är ungefär 3,7 meter lång och av
säkerhetsskäl kan endast en arm röra sig åt gången. De fyra kamerorna
på Dextre ger besättningen en bra och nödvändig överblick för att kunna styra
Dextre inifrån stationen. Det kommer även vara möjligt att styra Dextre
nerifrån jorden.
Den japanska forskningsmodulen - Kibo
Artistbild över Kibo.
Bild: NASA.
|
Kibo, som betyder "Hopp", är Japans största enskilda bidrag
till rymdstationen. Totalt kommer de olika delarna att skickas upp på
tre separata rymdfärjeuppdrag (STS-123, STS-124 och STS-127).
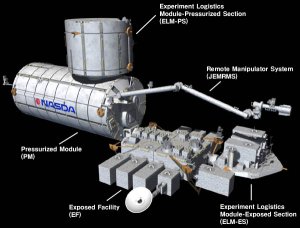
Den del
som kommer att skickas upp med STS-124 är huvudmodulen (Pressurized
Module (PM)) som är 11,2 meter lång
och 4,4 meter bredd. Vikten är 15 900 kilo. I denna cylinderformade
modul finns det plats för upp till tio experimentrack och visst
förrådsutrymme.
Japanerna har dock tänkt på det här med förrådsutrymme
och ombord på STS-123 kommer en 3,9 meter gånger 4,4 meter cylinderformad
förrådsmodul (Experiment Logistics Module (ELM)att finnas. Denna modul kommer sedan dockas med huvudmodulen och
utgöra förrådsutrymme. Modulen har både en lufttrycksatt del och en icke
lufttrycksatt del. ELM kommer tillfälligt att dockas med Harmonimodulen.
Den sista delen tillhörande Kibo är en plattform (Exposed
Facility (EF)) som
kommer att sitta på utsidan av forskningsmodulen. På denna plattform
kommer olika experiment att utsättas för den tuffa miljön i rymden. Det
finns även en robotarm (Remote Manipulator System (JEMRMS)) som bland annat kommer användas för
att flytta experiment mellan experimentplattformen och förrådsutrymmet.
Den totala längden på robotarmen är 9,9 meter. För att kunna flytta
experiment mellan in- och utsidan finns det en luftsluss på kortsidan av
huvudmodulen.



